

Results 1 to 8 of 8
-
08-27-2014, 11:07 PM #125+ Posting Member



- Join Date
- Dec 2010
- Location
- USA, Oklahoma
- Posts
- 52
Real Yaw Damper Conversion experiment
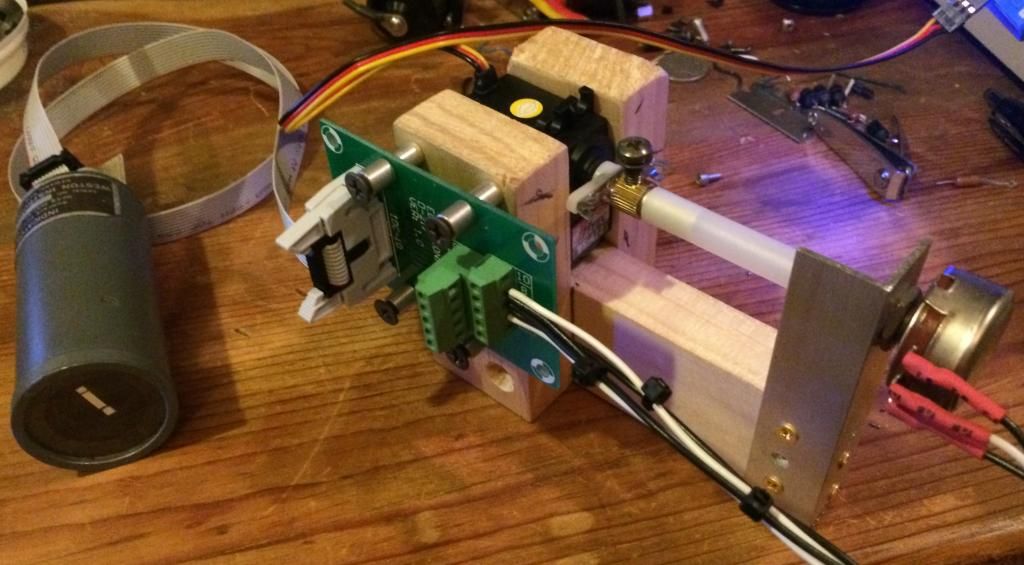
Converted a real yaw damper to servo controlled. The original movement is a center-zero type standard low current meter (probably 1mA or less). Used a wheatsone bridge circuit and a servo-pot to drive it from 5v supply. Used original circuit boards to wire wheatstone resistor network onto and brought connections out back to IDC connector so I could run external pot and lighting power. Built small frame to mount servo-pot link and will throw it behind mip. IDC will allow easy unplug and takedown of panel. Testing is done. Just waiting for another OC servo card to drive the servo from Prosim737 software. Wanted to use original movement instead of trying to engineer the servo directly to meter needle. This was much easier in the long run I think. Clunky behind MIP but compact up front this way. ANother idea would be skipping servo and using a RC electronic speed controller (brushed motor type) that reverses. I may try that along the way. Those plug in place of the servo and convert servo pulse width to reversible PWM pulsed DC. That way you could in theory run the meter direct bidirectional from the ESC. A future experiment/upgrade maybe...

-
Post Thanks / Like - 1 Thanks, 0 Likes, 0 Dislikes
 Flying_Fox thanked for this post
Flying_Fox thanked for this post
-
08-28-2014, 04:19 PM #275+ Posting Member
- Join Date
- Feb 2012
- Location
- North Carolina
- Posts
- 93
Re: Real Yaw Damper Conversion experiment
What signal does Prosim send to tell the instrument to "swing" left and right? How does Prosim know the plane is yawing?
-
08-28-2014, 09:59 PM #325+ Posting Member
- Join Date
- Dec 2010
- Location
- USA, Oklahoma
- Posts
- 52
Re: Real Yaw Damper Conversion experiment
Nick: Thanks! Regarding the pin out: the original gauge used small transformers in the gauge (cannot see them in the pic below but they are right under the board) itself and some kind of ac signaling/rectification from the flight management computers. Bottom line is the final output from all this original "transduction" inside was 2 wires feeding the simple DC zero center meter movement. I just slowly found the current requirements of the meter itself by testing thereby eliminating the long search for specs on the thing. Long story short is that I removed the original circuitry and used the orig circuit boards and kept a few resistors to build up a simple bridge circuit (just 3 resistors). I then completely removed the male canon type plug on the back of the unit, and replaced it with the small breadboard that you see in photos, which hosts the IDC ribbon cable connector. So I in effect cheated and bypassed the original pin out and just made my own much simplified pin out. The original circuit looked quite intriguing and I'd like to learn how it works but my gut feeling is that it uses some type of ac phasing to create a balanced bridge. Bi-directional zero center meters need dual directional current flow but I didn't want to build dual rail power supply for just one meter so I finally came up with the idea of a bridge circuit. Using the original movement will produce a much smoother needle effect than direct drive servo'ing. Sorry for rattling on about this but I hope somebody else will try this along the way also with a real YD gauge and maybe improve on my way of doing it. Here is photo below showing the actual simplicity of the gauge guts.One of the series resistors will soon become a trim-pot to adjust full scale deflection at my 5v final rail voltage in the sim. This was an easy conversion anybody can do. Look for the real deal and you get the real backlighting and also the glass has AR coating like you see in the real cockpit too. A nice little nuance.

-
08-28-2014, 10:16 PM #425+ Posting Member
- Join Date
- Dec 2010
- Location
- USA, Oklahoma
- Posts
- 52
Re: Real Yaw Damper Conversion experiment
NedHamilton: Prosim has gauge assignment options in the config menu. For most of the gauges it allows only servo assignment. You can calibrate the meter/servo positions on this menu in prosim. It would have been easier if it allowed analog output on this but most sim gauges are servo driven so I just inserted the electrical stage between the servo and the actual dc movement in this case(clunky but I think it's going to work). Now regarding prosim's treatment of yaw damper.
I'm still learning what actually happens inside of the prosim software but so far I think I have learned that it does not truly simulate a YD effect as does not FSX. I plan to find out more about it but possibly just does a bit of auto rudder'ing. The real world 737 YD corrects dutch roll of course by definition, and lateral bump at high alt where lat winds can be bumpy to passengers, but the reading I have done (confusing) indicates it in fact does kick in to help on coordinated turns as well. It give only few degrees of rudder max and depending on flaps up or down. I just learned recently that boeing does not recommend rudder pedal use on routine turns in this size plane - rather only on runway/takeoff/approach. I read that the "seasoned" pilots do in fact coordinate their turns with a little bit of rudder. My understanding is that the yoke-only turns coordinate fine without rudder just by aileron and spoiler movement and probably some rudder input from FC when YD switch is ON (I'm way out of my comfort zone here on this aerodynamic stuff) . Maybe a sticking danger if used for routine in flight turns- can't imagine still a problem after valve redesign?? I will try to figure out what prosim really does to feed the YD indicator as I go now that I have an indicator on its way into my set-up. Oh one more afterthought, I have wondered if prosim uses some/all of the info coming from the slip indicator on the PFD. I've never paid that much attention to it but now I'm interested to watch it closer. Correct me on any of this because I am just figuring a lot of this out about "yaw dampering".
-
08-29-2014, 08:00 AM #575+ Posting Member
- Join Date
- Feb 2012
- Location
- North Carolina
- Posts
- 93
Re: Real Yaw Damper Conversion experiment
Thanks for the interesting explanation. Nice to know about the "rudder-not-used-in-routine-turns" convention. I don't use it much in my sim but mostly because i'm lazy. I had wondered about 'connecting' yaw damper to the Prosim slip indicator too. Anyway sounds like you are having fun experimenting with real hardware. You have done a nice job with the Yaw damper indicator. Aside from flying, I too enjoy building hardware and developing software.
-
08-29-2014, 12:06 PM #6150+ Forum Groupie

- Join Date
- May 2007
- Location
- USA
- Posts
- 263
Re: Real Yaw Damper Conversion experiment
Hi Dave,
Nice job! Just curious why not use a phidgetAnalog 4-output http://www.phidgets.com/products.php?product_id=1002 to control the Yaw Damper gauge? I've converted 8 real Yaw Damper gauges using the Phidgetanalog boards ,and they work like a charm with Prosim.
Cheers,
PhilIF it's not Boeing I ain't going!!!!!!
-
08-31-2014, 07:13 PM #710+ Posting Member
- Join Date
- Aug 2008
- Location
- Melbourne Australia
- Posts
- 19
Re: Real Yaw Damper Conversion experiment
G'Day daveaust et al.
Well done. I'm building an Aerocommander twin and have a number of old gauges yet to be converted. I went down the line of DC motor controller for my VORs.. Works a treat. Just used a brushed DC motor controller which allows movement in both directions. Initially the voltage and current was too high, (Lucky i didn't fry anything), so I used a resister in series with one of the input wires, hey presto. I plugged in a digital readout servo tester to confirm centre and endpoints. Adjusted the resister until I got full deflection both directions. The conversion cost about $5.00 per channel. you can get them at http://www.hobbyking.com/hobbyking/s...USHED_ESC.html simplest conversion ever.
Cheers from melbourne (Australia)
Rob.
-
09-02-2014, 10:43 AM #825+ Posting Member
- Join Date
- Dec 2010
- Location
- USA, Oklahoma
- Posts
- 52
Re: Real Yaw Damper Conversion experiment
PhilB737: Thanks! Yes I would have for sure used an analog output from a phiget or from my PoKeys card but I am using prosim737 software and it only has servo outputs for YD versus any analog assignment options. I could have written a script for FSUIPC to communicate directly but I wanted to keep the assignments inside prosim so I just decided to adapt and it was kind of fun to rig this up to accomodate that(even tho it's kind of a barbaric approach!).
rjfon1: Excellent that you have actually implemented the electronic speed controller. I was wondering if that would work. I thought it would need a voltage divider and you confirmed that for me. I knew the ESCs were cheap but thought I might experiment with that later on. I just got another opencockpits servo card so I now have 6 more servo channels to play with. The OC sioc scripts are fairly easy to set up once you fiddle with the platform for a while. I still occasionally wrestle with it tho. I got a TCAS radio from OC and modded a std script for it this weekend. It seems to work. My F-overhead is OC but it already has a canned script I used to get it up and going so I haven't changed much in that script. I think I'm getting way off the subject now so thanks again for jumping in here...



 Reply With Quote
Reply With Quote



Search Prettys Womans from your city for night
5.Sharing an Essay about PIC16F877